|
|
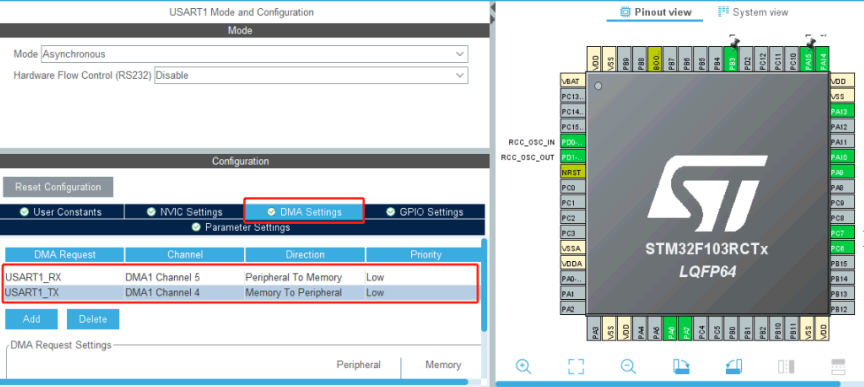
į┌ÖCŲ„╚╦┐žųŲųąŻ¼å╬Ų¼ÖCŻ©Arduino/STM32Ż®┼c╔Ž╬╗ÖC(Raspberry Pi/NVIDIA Jetson nano)ų«ķgĄ─═©ą┼Įø│Ż▓╔ė├┤«┐┌═©ą┼Ą─ĘĮ╩ĮŻ¼─Ūæ¬įō╚ń║╬╩╣ė├STM32Ą─┤«┐┌═©ą┼ęį╝░Ė∙ō■ūį╝║Č©┴xĄ─ģfūhüĒ═Ļ│╔öĄō■Ą─Įė╩š┼c░l╦═─žŻ┐ ┤_Č©┤«┐┌Ą─öĄō■ģfūh "e" Ę┤üā╔éĆļŖÖCĄ─ŠÄ┤aŲ„├}ø_ėŗöĄųĄŻ¼įōėŗöĄųĄ▀_ĄĮūŅ┤¾ųĄ╗“ūŅąĪųĄĢrūįäėŪÕ┴ŃĪŻ "m" l_speed r_speed "m"×ķ┐žųŲś╦ųŠŻ¼l_speed×ķū¾▌åĄ─╦┘Č╚ųĄŻ¼r_speed×ķėę▌åĄ─╦┘Č╚ųĄŻ¼įōųĄå╬╬╗×ķ cm/s ┼õų├┤«┐┌ ×ķ┴╦╠ßĖ▀┤«┐┌═©ą┼Ą─ą¦┬╩Ż¼£p╔┘ę“×ķūų╣Øé„▌öČ°▓╗öÓę²ŲųąöÓī¦ų┬┘Yį┤Ą─└╦┘MŻ¼┐╔ęį▓╔ė├DMA+┤«┐┌┐šķeųąöÓĄ─ĘĮ╩Įī”öĄō■▀MąąĮė╩šĪŻ DMA DMAŻ║Direct Memory AccessŻ¼┐╔ęįīŹ¼Fę╗éĆöĄō■Å─ę╗éĆĄžųĘ┐šķg┐ĮžÉĄĮ┴Ēę╗éĆĄžųĘ┐šķgŻ¼▓óŪęį┌öĄō■┐ĮžÉ▀^│╠ųą¤oąĶCPUĄ─Ė╔ŅAŻ¼į┌öĄō■┐ĮžÉĮY╩°║¾▓┼Ėµų¬CPU▀Mąą╠Ä└ĒĪŻę“┤╦╩╣ė├DMA╣”─▄┐╔ęįßīĘ┼CPU┘Yį┤ĪŻ ┤«┐┌┐šķeųąöÓ Ųš═©Ą─┤«┐┌╠Ä└ĒöĄō■ĘĮ╩Į×ķå╬ūų╣ØĮė╩šŻ¼▓óŪęĮė╩šę╗ļöĄō■ĢrŻ¼ąĶę¬ūįąą┼ąöÓļŅ^ļ╬▓┤_Č©╩Ūʱ×ķę╗ļ═Ļš¹öĄō■Ż¼▓óŪę«ööĄō■┴┐┤¾Ģ■ī¦ų┬ŅlĘ▒▀M╚ļųąöÓĪŻČ°▓╔ė├┤«┐┌┐šķeųąöÓŻ¼į┌┤«┐┌┐šķeĢr(░l╦══Ļę╗ļöĄō■)«a╔·ųąöÓŻ¼▓óŪę┐╔ęįį┌ųąöÓĘ■äš║»öĄųąėŗ╦ŃĄ├ĄĮĄ─öĄō■ķLČ╚Ż¼ī”š¹Ä¼öĄō■▀Mąą╠Ä└ĒĪŻ STM32CubeMXųąĄ─┼õų├ į┌┤«┐┌1┼õų├ųą┤“ķ_DMA╣”─▄Ż¼ŲõėÓ┼õų├┐╔ģó┐╝ų«Ū░Ą─╣ż│╠
|
| ░µÖÓ╦∙ėą © ▒▒Š®äōØ╔ųŪ╗█ÖCŲ„╚╦┐Ų╝╝ėąŽ▐╣½╦Š ĄžųĘŻ║▒▒Š® ŪÕ╚A┐Ų╝╝ł@Cū∙╬ÕśŪ ļŖįÆŻ║4006-937-088 Š®ICPéõ20010582╠¢-2 |